github.com/LocusRobotics/robot_navigation
robot_navigation
A massive rewrite of the ROS Navigation stack designed for modularity and customizablility.
ROSCon 2018 Talk

David V. Lu!! is a open source robotics software developer living in London, Ontario, Canada. [he/him]
Developer of ROS software since 2010 focusing on mobile robot navigation and human-robot interaction. Code I've developed is deployed on robots in production around the world.
Maintainer and Contributor to many of the core ROS packages. Active member of forums. Four-time presenter and two-time program chair for ROSCon conference.
Taught courses from introductory to graduate level at Washington University and Chatham University. Also published numerous papers.
Sometimes when I'm lucky, my interests in theatre and music overlap with the robotics work.
There are too many David Lus on the internet, but only one of them puts extraneous punctuation after his name to stand out!!
I specialize in robot navigation and actual ROS code, but also have a number of projects that gather and display information about ROS code.
A massive rewrite of the ROS Navigation stack designed for modularity and customizablility.
ROSCon 2018 Talk
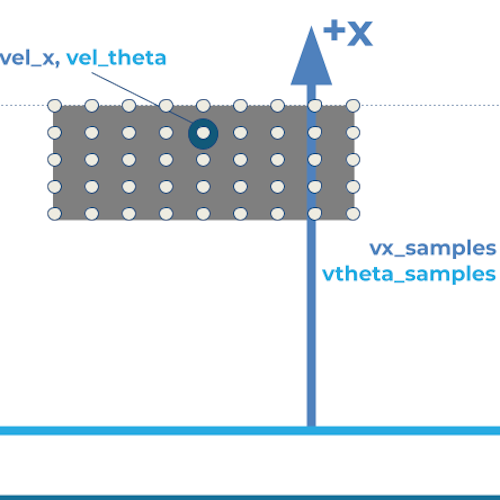
Successor to DWA Local planner, incorporated in robot_navigation and ROS 2 Navigation.
ROSCon 2017 Talk
ROS 2 Navigation Paper
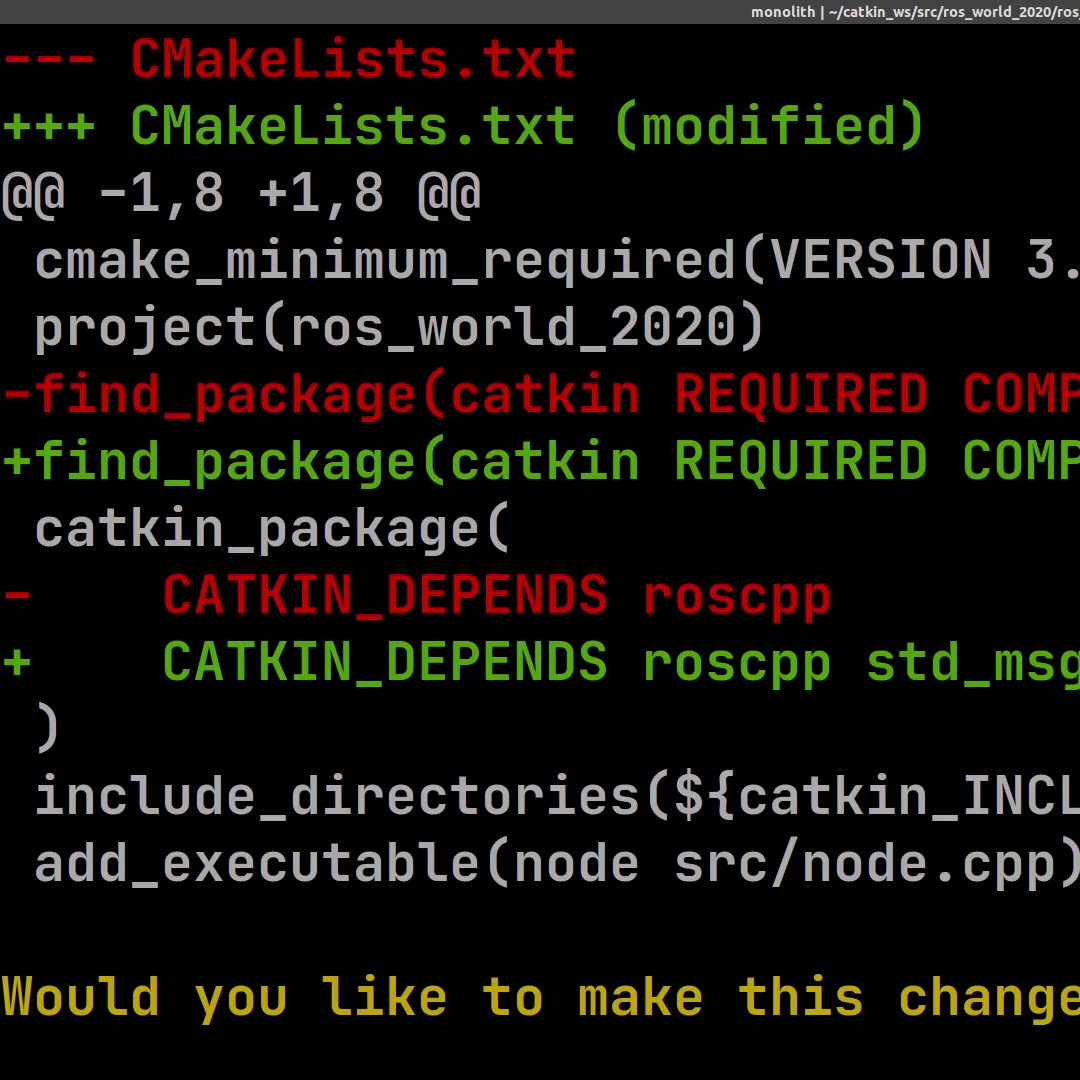
The easy command-line tool for fixing common ROS meta-data errors and cleaning up ROS packages.
ROS World 2020 Video
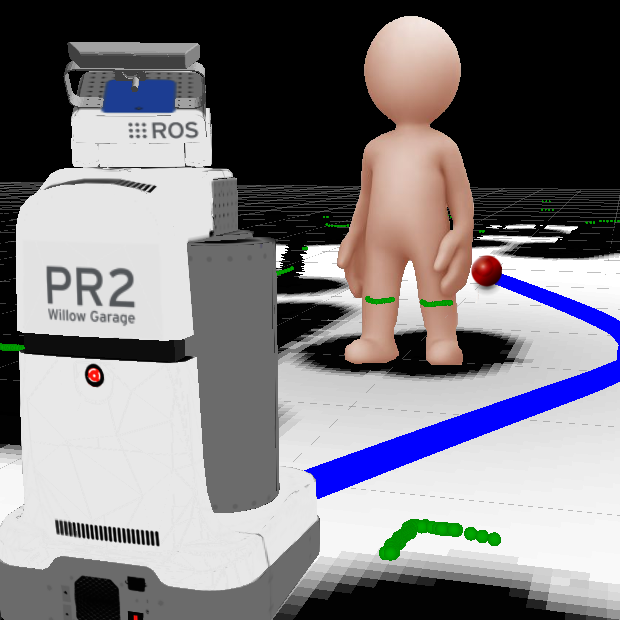
The original killer app for ROS, which incorporates the layered costmap algorithm from my PhD thesis, which I also discussed at ROSCon 2014.
As part of a collaboration between PickNik and Hello Robot, ported the Stretch drivers to ROS 2 and enhanced MoveIt2 to create joint plans with arm and base motion.

Large-scale refactoring of the original MoveIt (1) Setup Assistant for ROS 2 with modular data structures and plugins to enable extensible development.
A library for unifying the ROS command-line tools across ROS 1 / ROS 2 and the different build tools.
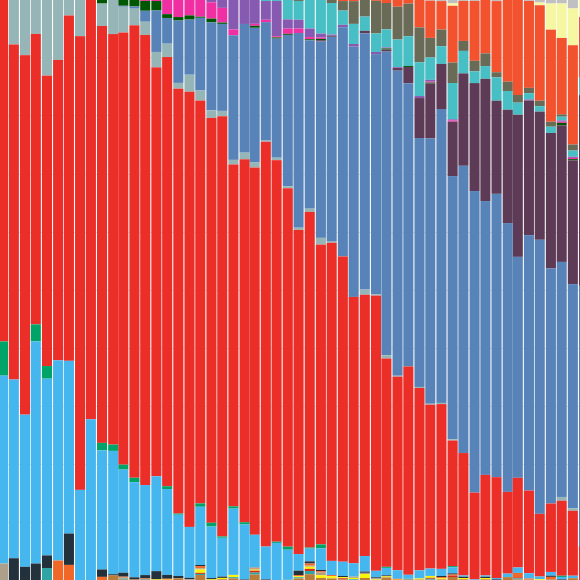
An automated collection of statistics about the ROS ecosystem through time, gathered with many different APIs, including statistics previously from ROS Answered.
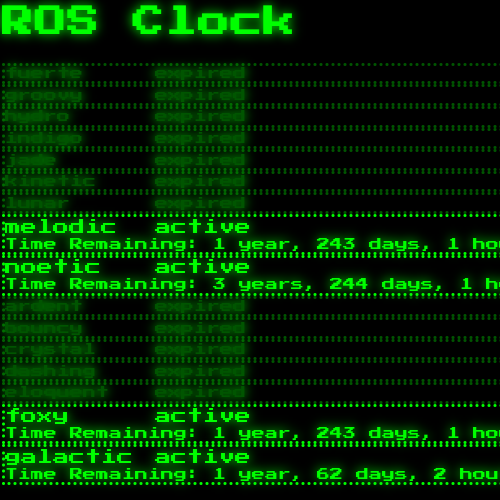
Website (inspired by pythonclock.org) for tracking the periods of support for ROS distros
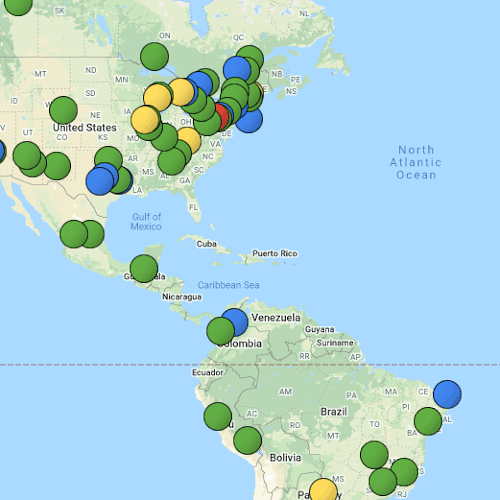
A crowd-sourced map of ROS users around the world.
The current status of the ROS buildfarm across multiple distros. Previously this information was part of ROS Crawl.
A simple tool for getting information about a ROS system to share
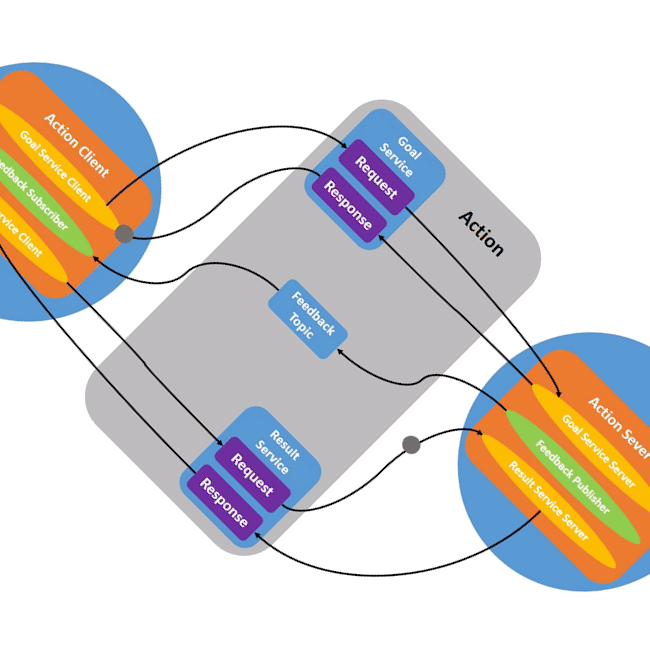
A simple version of the rclpy/rclcpp action libraries for ROS 2.
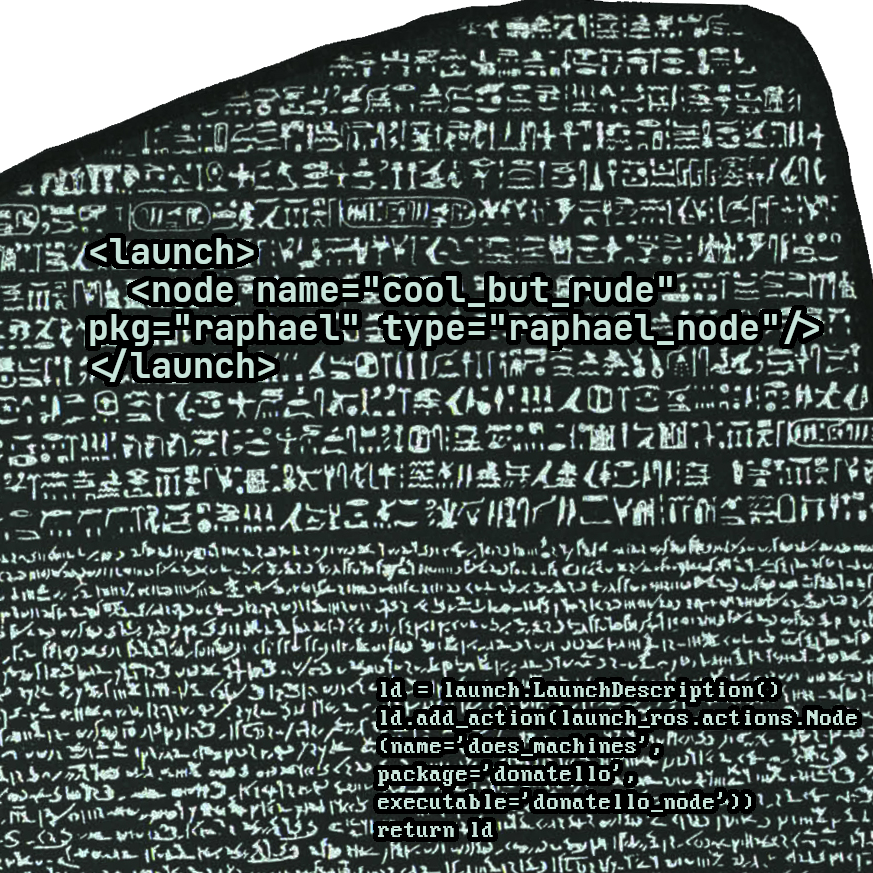
A tutorial exploring the features of ROS 1 and ROS 2 launch files.
Simplified ROS 2 interface in the style of ROS 1 for reading and writing bag files

Launch files for common URDF operations
Reimplementation of the tf/transformations.py library for common Python spatial operations in ROS 2
A set of tutorials for authoring models following the Unified Robot Description Format. My first big
contribution to ROS.
ROSCon 2012 Talk

An original play for three human actors and one robot actor, produced by the WUSTL Performing Arts department.
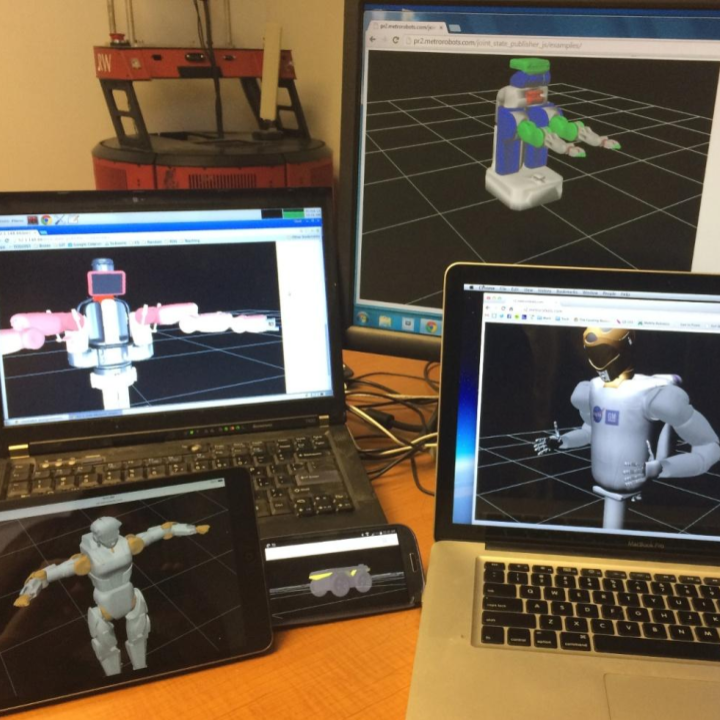
Tool for visualizing ROS in the browser, to which I added visualizations for Point Clouds and a bunch of other datatypes.
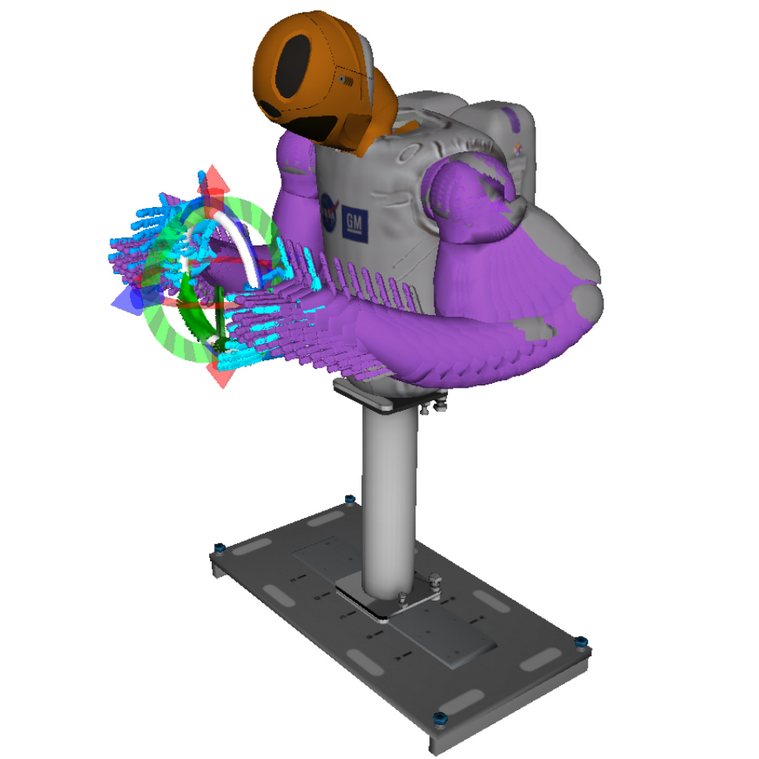
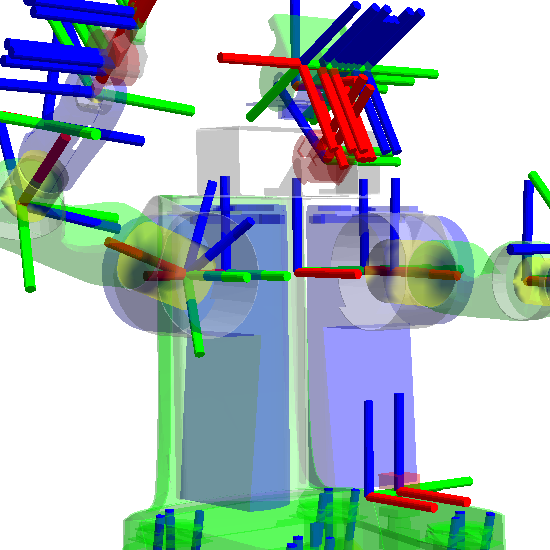
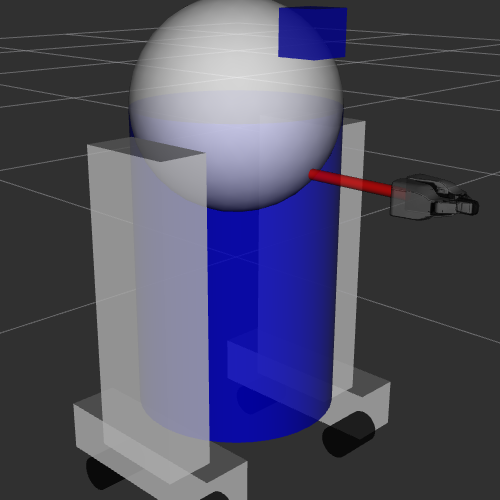
Visualizations for helping teleoperate robots to do high level tasks. Part of a collaboration between Chad Jenkins, Brown University, TracLabs and NASA

Founder of independent ROS Consulting business, working with Brown University/NASA, Southwest Research Institute, Locus Robotics and more!

Senior Robotics Scientist working with varied clients from startups to Fortune 100 companies.
Senior Roboticist enhancing the navigation capabilities of fleets of warehouse robots with a ground-up rewrite of the path planning algorithms.
Robotics Scientist implementing new algorithms for robot navigation, monitoring and data collection on Bossa Nova's shelf scanning robots.

Research intern, integrating layered costmap algorithm into the core ROS Navigation stack and using it to implement social navigation behaviors.

R & D intern, investigating integrating next-gen animatronics with ROS, alongside innovative roboticist Akhil Madhani.

Intern with the Maps team, enhancing the Local Business Center (now Google My Business).

Four-time intern, working with the IBM Research team, their premier internship program "Extreme Blue" and the zSeries Product Engineering team.
My preferred contact method is email, but there are many other places where you can find me.